

The line between embedded Linux vs RTOS has blurred in 2026. Zephyr now ships full TCP/IP, TLS 1.3, and BLE stacks that once required Linux. Linux with the PREEMPT_RT patch now hits latencies that once demanded a dedicated RTOS. Yet the wrong choice still costs teams months of rework, blown BOM budgets, or missed real-time deadlines on production hardware.
This guide cuts through that noise. The embedded Linux market reached USD 0.48 billion in 2025, while the global RTOS market crossed USD 7.22 billion in the same year both are growing, and both are valid choices depending on what you’re building. By the end of this article, you’ll have a clear decision framework, real latency and footprint numbers, and a short list of use cases where each platform wins.
Quick Comparison of Linux for Embedded Systems vs RTOS
| Factor | RTOS | Embedded Linux |
| Determinism | Hard real-time (5–15 µs worst-case) | Soft real-time (PREEMPT_RT: <150 µs typical) |
| RAM needed | 4 KB – 2 MB | 32–64 MB minimum |
| Boot time | <100 ms | 5–30 seconds |
| Typical hardware | Cortex-M, RISC-V MCUs | Cortex-A SoCs |
| Networking | Available (Zephyr, FreeRTOS+TCP) | Native, full stack |
| Long-term support | Zephyr LTS: 2.5 yrs | Linux kernel LTS: 6 yrs, Yocto LTS: 4 yrs |
| Best for | Real-time control, battery devices | Connected products, GUIs, edge AI |
What Is an RTOS?
A Real-Time Operating System (RTOS) is built around one core promise: deterministic execution. When a high-priority task needs to run within 50 microseconds, it runs within 50 microseconds every time. That guarantee comes from a small, preemptive scheduler, minimal background activity, and no virtual memory layer to introduce timing jitter.
The major RTOS options break into three groups:
- Lightweight & free
FreeRTOS (maintained by AWS) and Zephyr (Linux Foundation project) dominate new designs. Both run on Cortex-M class microcontrollers with as little as a few kilobytes of RAM. - Safety-certified commercial
VxWorks, QNX Neutrino, and SafeRTOS are pre-certified for DO-178C (aerospace), ISO 26262 (automotive), and IEC 62304 (medical) saving years of certification work. - Specialized
ThreadX (now Eclipse ThreadX), μC/OS-III, and RIOT for IoT-specific workloads.
RTOS code typically runs without an MMU in a single address space, which keeps context switches fast but means a bug in one task can corrupt another. That’s the trade-off for predictability.
What Is Embedded Linux?
Linux for embedded systems is the full Linux kernel paired with a custom userspace, stripped down and tuned for a specific device. It runs on application-class processors (Cortex-A, x86, RISC-V application cores) and gives you the entire desktop Linux ecosystem: virtual memory, process isolation, a multitasking scheduler, drivers for thousands of peripherals, and mature stacks for networking, storage, graphics, and security.
Teams typically build embedded Linux images with one of three tools:
- Yocto Project
industry standard for production devices. Reproducible builds, long-term support, used by automotive, industrial, and consumer electronics OEMs. - Buildroot
simpler than Yocto, faster builds, popular for smaller projects. - Vendor BSPs
NXP, TI, Qualcomm, and others ship pre-integrated Linux distributions for their SoCs.
The scale of adoption is hard to overstate: 58% of the 14.2 billion connected IoT devices worldwide ran on Linux-based systems in 2024, and roughly 60% of IoT gateways and 65% of 5G base stations run on Linux today.
Embedded Linux vs RTOS: Head-to-Head
Latency and Determinism
RTOS wins decisively here. FreeRTOS and Zephyr deliver worst-case interrupt latency in the 5–15 µs range on a Cortex-M4. VxWorks performs similarly on more capable hardware. The behaviour is consistent the same code path takes the same time, every time.
Mainline Linux is best-effort. Under network load, latency spikes past 500 µs are common. The PREEMPT_RT patch tightens that significantly measurements typically show worst-case latency under 150 µs with PREEMPT_RT enabled. That’s good enough for soft real-time tasks like industrial HMIs or robotics motion planning, but not for closed-loop motor control at 10 kHz or safety-critical medical timing.
Hardware Footprint and Cost
An RTOS runs on a $1 microcontroller. Embedded Linux needs an application processor, typically $5–$15 per unit, plus 32–64 MB of RAM and 128 MB+ of flash. At scale, that difference flows straight to the BOM.
Boot Time
RTOS devices boot in under 100 milliseconds critical for airbag controllers, automotive ECUs, and instant-on consumer devices. Embedded Linux typically takes 5–30 seconds, though aggressive optimization can push it under 2 seconds for specific applications.
Networking and Software Ecosystem
Linux is unmatched here. Need WireGuard VPN, gRPC, a Postgres client, OpenCV, or TensorFlow Lite? It’s a bitbake recipe away. Modern RTOS options have closed the gap on basics Zephyr ships TLS 1.3, MQTT, CoAP, LwM2M, and a complete BLE mesh stack but you won’t find a video pipeline or a database engine.
Real-world deployments push the Linux networking stack hard: traffic shaping, QoS, multi-homed routing, custom protocol offload, and SmartNIC integration. Tuning that stack netfilter rules, eBPF programs, custom kernel modules is where teams like Mpiric Software’s Linux kernel networking practice typically get involved.
Security and Maintenance
Linux benefits from a massive security community: kernel CVEs are typically patched within days, and Linux LTS kernels get 6 years of maintenance, with Yocto LTS releases supported for 4 years. For a product with a 10+ year service life, that maintenance pipeline is a major asset but only if you actually consume it. Many embedded products ship on a vendor BSP that gets one update and then never sees another patch. Closing that gap requires deliberate kernel security and hardening work: enabling KASLR, stack protection, lockdown mode, SELinux or AppArmor policies, and integrating CVE monitoring into the build pipeline.
RTOS security is narrower and tighter. The attack surface is smaller, but you’re more dependent on the vendor. Zephyr ships PSA Certified components, MCUboot for secure boot, and TF-M integration for ARM TrustZone-M. Zephyr LTS releases are supported for 2.5 years, which is adequate for shorter product cycles but a consideration for long-life designs.
Long-Term Maintainability
The maintenance question separates a 3-year product from a 15-year product. If you fork the kernel and never push changes back, every kernel upgrade becomes a manual merge and that gets exponentially harder as the mainline moves forward. The disciplined approach is to upstream your changes for long-term maintainability, so your custom drivers and SoC support ride along with future kernel releases instead of rotting on a vendor branch.
When to Choose an RTOS
Pick an RTOS when any of these are true:
- Hard real-time deadlines
motor control, drone flight controllers, motor drivers, anti-lock braking - Battery life is critical
wearables, asset trackers, sensors running multi-year on a coin cell - Cost per unit matters at scale
consumer electronics shipping in millions, where saving $5 of BOM dwarfs engineering cost - Safety certification is required
pacemakers, infusion pumps, automotive ECUs, avionics - Boot time must be instant
airbag deployment, industrial emergency stops
Typical signal: your hardware is a Cortex-M, you’re not running a display, and the firmware fits in under 1 MB of flash.
When to Choose Embedded Linux
Choose embedded Linux when any of these apply:
- You need a GUI or touchscreen
HMIs, kiosks, infotainment systems (over 80 million vehicles now run Linux-based infotainment) - The device is a gateway
protocol translation, cloud sync, multiple radio stacks - You’re doing edge AI or computer vision
TensorFlow Lite, ONNX runtime, GStreamer pipelines - You need rich connectivity
Wi-Fi, cellular, VPN, container workloads, REST/gRPC APIs - The product has a 10+ year lifecycle
Linux’s LTS and security ecosystem outlast most commercial RTOS vendors
Production-grade embedded Linux is rarely a stock distribution. It’s a custom kernel configuration, a tuned device tree, vendor-specific drivers, and userspace stripped to the bare minimum the product needs. That’s the realm of core Linux kernel development writing and maintaining drivers, debugging kernel panics with kgdb and ftrace, and adapting subsystems to fit the hardware in front of you.
The Hybrid Architecture: Linux + RTOS on One SoC
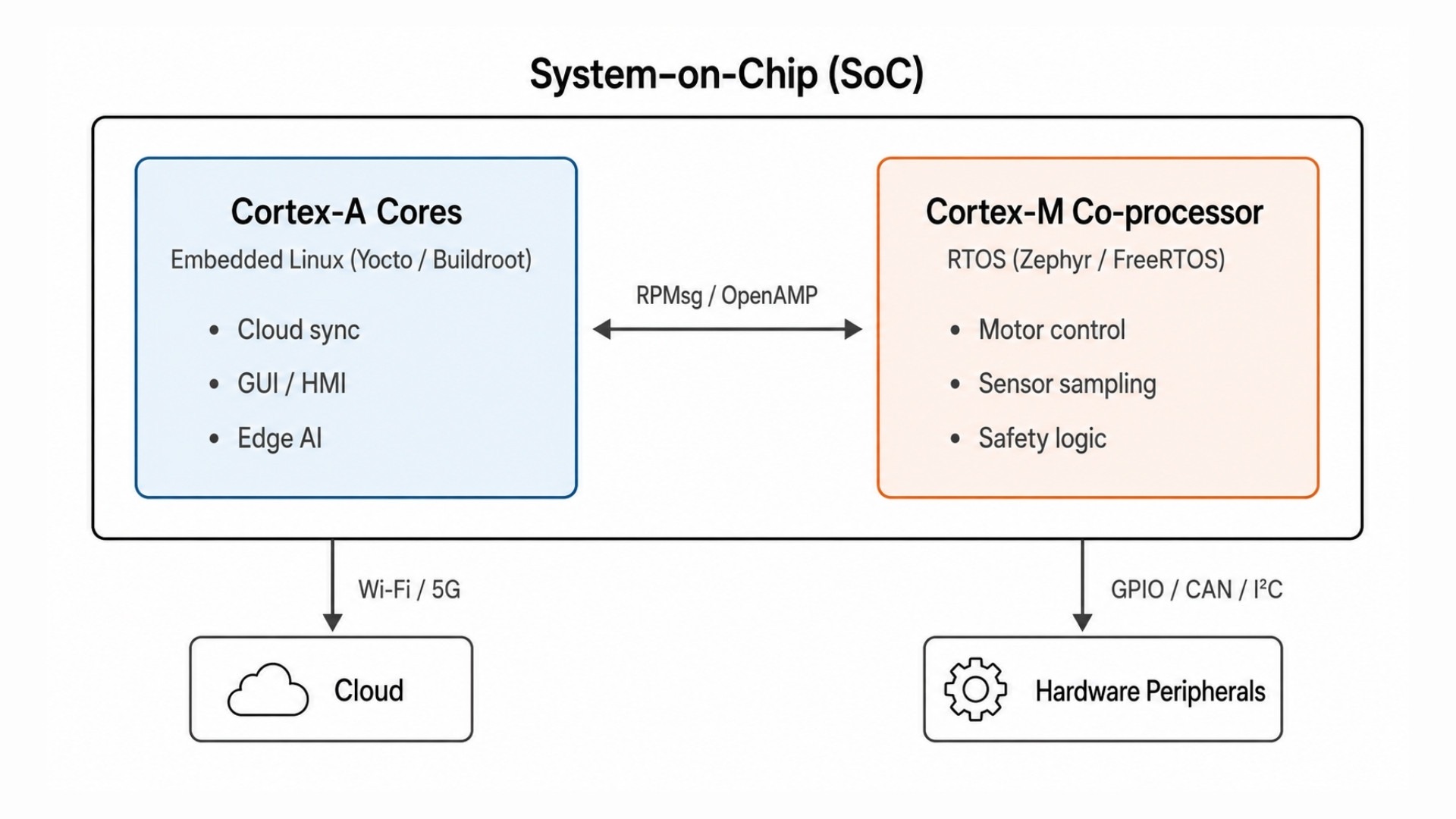
Modern application SoCs NXP i.MX 8, TI AM62/AM64, STM32MP1 ship with both a Cortex-A core (for Linux) and a Cortex-M co-processor (for an RTOS), communicating over the standardized RPMsg interface. You get rich connectivity and real-time control on a single chip.
flowchart LR
subgraph SoC[“System-on-Chip”]
subgraph CA[“Cortex-A Cores”]
L[“Embedded Linux<br/>(Yocto / Buildroot)”]
L — APP[“Cloud sync<br/>GUI / HMI<br/>Edge AI”]
end
subgraph CM[“Cortex-M Co-processor”]
R[“RTOS<br/>(Zephyr / FreeRTOS)”]
R — RT[“Motor control<br/>Sensor sampling<br/>Safety logic”]
end
CA <–>|RPMsg / OpenAMP| CM
end
SoC –>|Wi-Fi / 5G| Cloud[(Cloud)]
SoC –>|GPIO / CAN / I2C| HW[Hardware Peripherals]
This pattern is increasingly common in industrial controllers, medical devices, and Edge AI cameras the Cortex-A handles vision inference and cloud connectivity, the Cortex-M handles deterministic control loops.
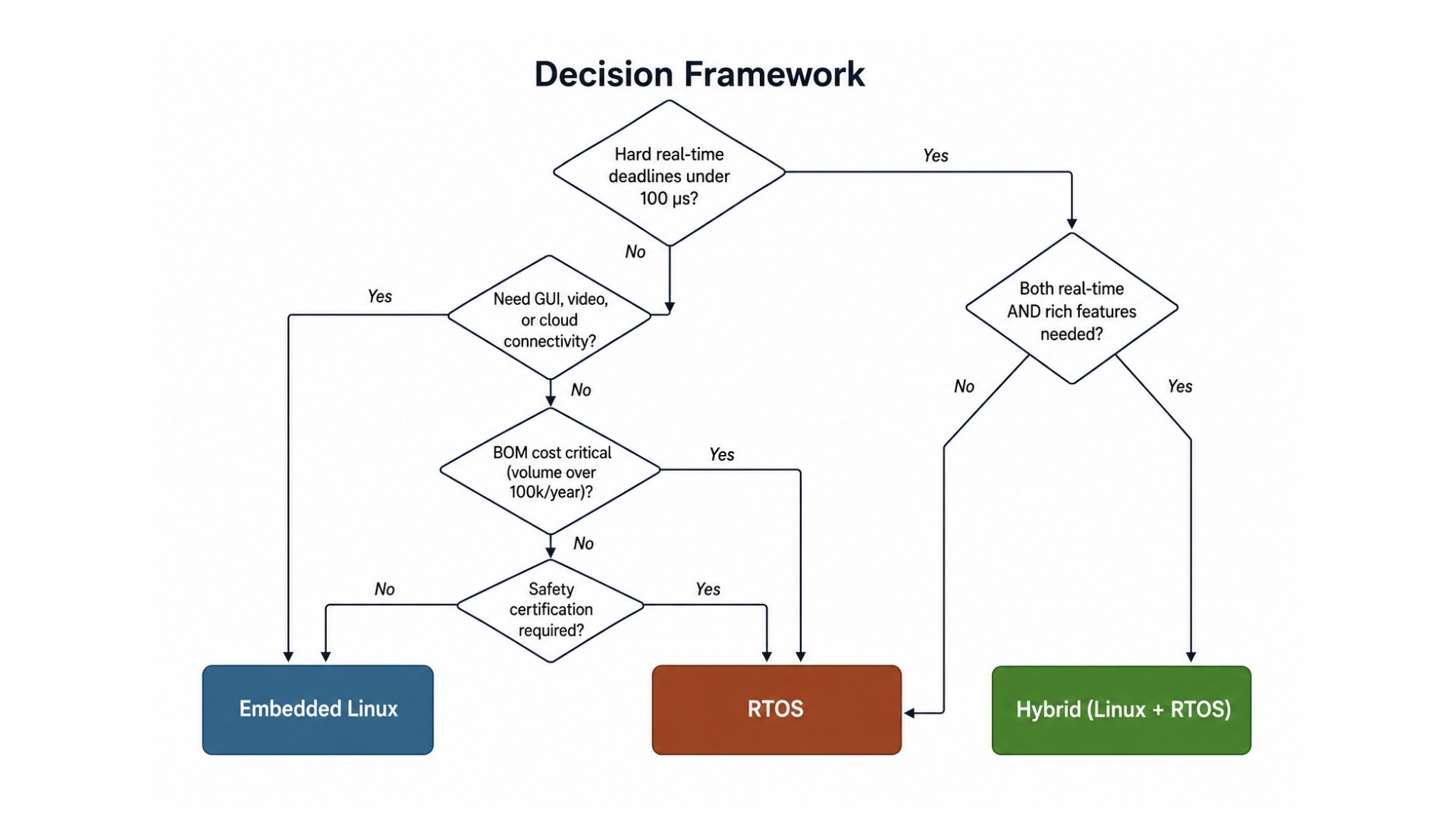
The Decision Framework
Six questions, in order, will tell you which platform fits:
flowchart TD
Q1{“Hard real-time<br/>deadlines under<br/>100 µs?”}
Q2{“Need GUI, video,<br/>or cloud connectivity?”}
Q3{“BOM cost critical<br/>(volume > 100k/yr)?”}
Q4{“Safety certification<br/>required?”}
Q5{“Both real-time AND<br/>rich features needed?”}
Q1 –>|Yes| Q5
Q1 –>|No| Q2
Q2 –>|Yes| LINUX[“Embedded Linux”]
Q2 –>|No| Q3
Q3 –>|Yes| RTOS[“RTOS”]
Q3 –>|No| Q4
Q4 –>|Yes| RTOS
Q4 –>|No| LINUX
Q5 –>|Yes| HYBRID[“Hybrid<br/>(Linux + RTOS)”]
Q5 –>|No| RTOS
style LINUX fill:#2d5f8b,color:#fff
style RTOS fill:#8b4a2d,color:#fff
style HYBRID fill:#4a8b2d,color:#fff
A useful sanity check beyond the flowchart: look at your team. An RTOS project lives or dies on low-level C, interrupt handling, and tight memory discipline. Embedded Linux projects pull in kernel drivers, Yocto, systemd, networking, security hardening, and DevOps for OTA updates. The right OS for your product is also the OS your team can maintain for the product’s full lifecycle.
Frequently Asked Questions
Is Linux a real-time operating system?
Not by default. Mainline Linux is a general-purpose, best-effort kernel. With the PREEMPT_RT patch (merged into mainline as of kernel 6.12), Linux delivers soft real-time performance with worst-case latencies typically under 150 µs suitable for many industrial applications, but not for hard real-time control loops under 50 µs.
Which is faster, RTOS or embedded Linux?
For raw computational throughput on application-class hardware, Linux is faster better compilers, optimized libraries, SIMD, multi-core scheduling. For predictable response time to external events, an RTOS is faster and far more consistent.
Can FreeRTOS run on a Raspberry Pi?
Yes, but it’s unusual. Raspberry Pis are Cortex-A based and natively run Linux. FreeRTOS or Zephyr is the better fit for Cortex-M boards like the RP2040 or STM32 Nucleo series.
Is Zephyr replacing FreeRTOS?
Zephyr is growing fast and has a richer feature set (SMP, full networking, BLE mesh), but FreeRTOS still dominates by deployment volume and remains the simpler choice for smaller projects.
Conclusion
The embedded Linux vs RTOS choice isn’t about which is “better” it’s about which fits your hardware, your latency budget, your team, and your product’s 10-year roadmap. RTOS wins when determinism, cost, and power matter most. Linux for embedded systems wins when connectivity, software ecosystem, and long-term maintainability dominate. And for a growing class of products, the right answer is both running side by side on a single SoC.
If you’re scoping a connected medical device, an industrial gateway, a wearable, or an Edge AI camera and want kernel-level engineering support on the Linux side, Mpiric Software offers structured open Linux kernel engagements from BSP work and driver development to security hardening and upstream contributions.



